

Роботы для транспортировки грузов на закрытых складах
Переход к роботизированным складам становится общемировой тенденцией. Это связано с потребностью ускорения логистических процессов на больших складах, где человеческие возможности достигли предела. Управление товарными запасами с помощью роботизированных систем уже доказало на практике экономическую эффективность, исключает ошибки, минимизирует аварии и риски для людей. В целом, именно автоматизация и решения по увеличению производительности труда станут ключевыми направлениями в логистике. Новое исследование J’son & Partners Consulting посвящено текущей практике и перспективам использования складских транспортных роботов в России и мире в целом.
Тенденции рынка, классификация складских роботов, решаемые задачи
Логистические роботы используются для автоматизации процесса хранения и перемещения товаров, когда они проходят через цепочку поставок. Простота автоматизации в логистике может быть обеспечена за счёт возможности дооборудования обычной техники до уровня полной автономности. Это уже происходит, к примеру, с вилочными погрузчиками. Усовершенствование технологий, таких как машинное зрение и конструкция захватов, позволит расширить диапазон применения логистических роботов.
В целом, можно выделить 3 основные группы устройств, которые на данный момент применяются на складах для перемещения грузов:
Автоматически управляемое транспортное средство (Automated Guided Vehicle)
Автономные мобильные роботы (Autonomous Mobile Robots)
Автоматизированные складские вилочные погрузчики RLT (Robotic Lift Truck)
Основные типы навигационных систем для управления складскими роботами:
- Лазерная система позиционирования
- Навигация по магнитной ленте
- Навигация с использованием магнитных точек
- Проводная навигация
- Оптическая навигация по линии
- Инерциальная навигация
- Автономная навигация (системы технического зрения с распознаванием образов при участии встроенного ИИ, софт класса SLAM (Simultaneous Localization And Mapping), лидары/сонары).
3 уровня автоматизации складской логистики:
- Full Autonomy (Полная автономность, человеческое вмешательство в процесс отсутствует)
- Cobotics (человек и робот работают совместно в процесс)
- Co-biotics (несколько различных роботов на разных платформах работают совместно с человеком). Этот уровень уникален тем, что роботы работают на разном ПО, но при этом способны коммуництировать друг с другом.
Рис. 1. Некоторые типы складских роботов (по часовой): самоходная транспортная тележка, автономный тягач, автономный штабелер, робот для перевозки пакетированных грузов
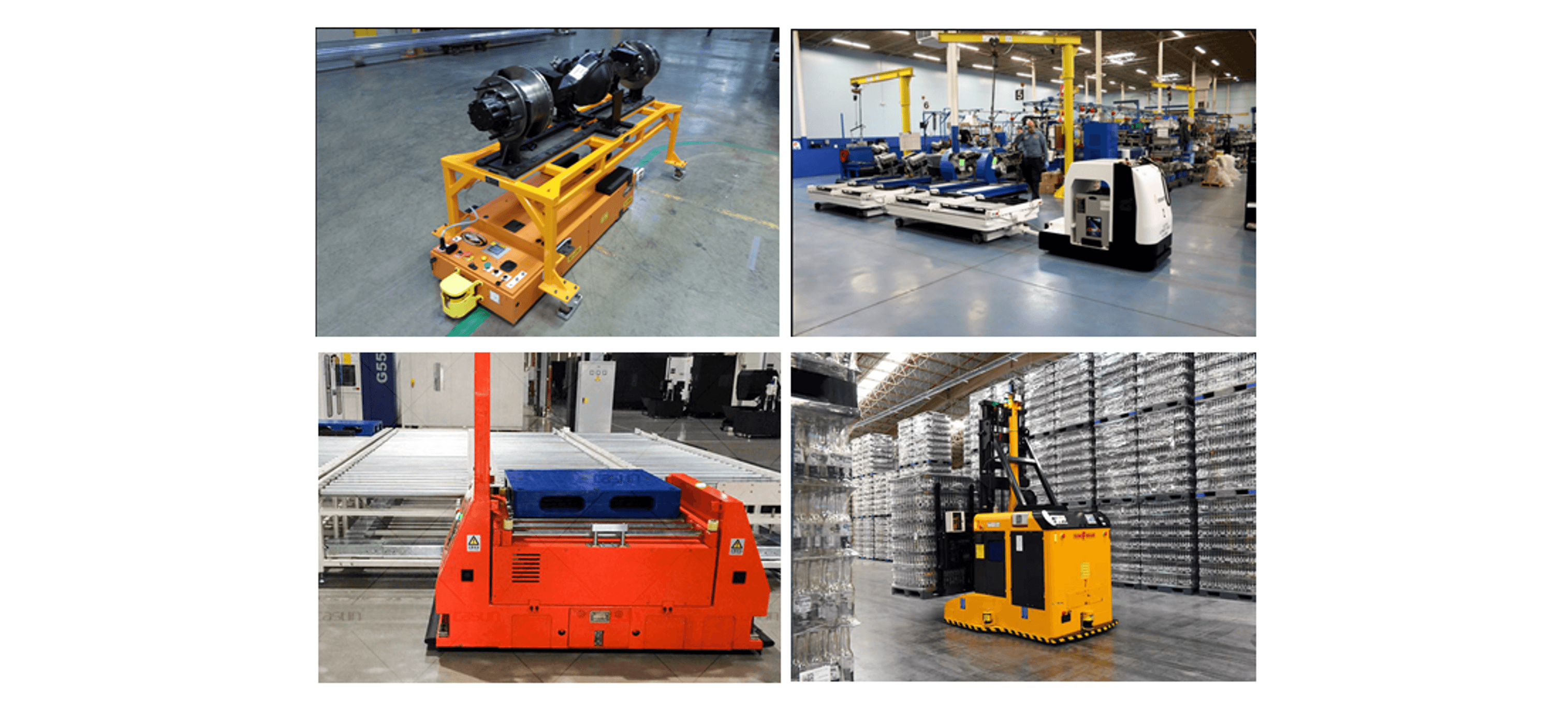 |
Источник: сайты производителей
Складские роботы находят применение в любых отраслях, в которых существует складское хозяйство. Быстро растущей отраслью является электронная коммерция. Тем не менее, в производстве также важно управление операциями в цепочке «склад-производство».
Можно выделить 8 ключевых операций, которые выполняют роботы на складах:
погрузка,
перемещение,
разгрузка,
паллетирование
депаллетизация
сортировка
упаковка
инвентаризация
Драйверы развития складской робототехники
Роботизация складов охватывает различные технологические тренды: большие данные, беспилотные транспортные средства, включая воздушный и наземный транспорт, коллаборативная робототехника и интернет вещей. Развитие и применение технологий позволяет автоматизировать различные складские процессы в нескольких сферах: от сельского хозяйства до электронной коммерции.
Склады имеют различные формы, размеры и цели, но независимо от размера, формы или назначения склада, все они имеют определенные требование по перемещению материалов. Мировой рынок складских помещений в целом находится в периоде роста, поскольку спрос на товары и услуги во всем мире растет наряду с увеличением численности населения в мире и ростом экономики на основных рынках. Однако рост складских площадей не обеспечивается увеличением доступности рабочей силы для поддержки растущих потребностей на многих крупных рынках, включая Соединенные Штаты, Японию, Китай и многие части Европы. Нехватка рабочей силы является одной из движущих сил усилий по автоматизации складских операций с помощью автономных мобильных роботов. Использование автономных мобильных роботов позволяет быстро масштабировать складские операции, переводить работников на более ценные задачи и снижать риск, связанный с зависимостью от краткосрочной сезонной рабочей силы.
Помимо проблем, связанных с трудовыми ресурсами, безопасность является ключевым элементом в движении к максимальному использованию автономных мобильных роботов для общей автоматизации склада. Например, по данным Министерства труда, безопасности и гигиены труда США (OSHA), более 11% вилочных погрузчиков попали в аварию. Вилочные погрузчики обычно используются для перемещения и транспортировки паллет на складе. Однако появление автономных мобильных роботов, которые способны взять на себя перемещение паллет/грузов, помогает уменьшить зависимость от вилочных погрузчиков для определенных операций и будет основной силой в повышении безопасности на складах.
С точки зрения цифровой трансформации бизнеса, автономные мобильные роботы на складе обеспечивают механизм автономного сбора данных о перемещении материалов и использовании запасов в рамках складских операций. Эти устройства становятся подключенными «конечными точками» и физической основой цифровизации. Кроме того, интеграция автономной мобильной роботизированной технологии с системами операционного уровня, такими как WMS (Warehouse Management System) и WES (Warehouse Execution System), будет способствовать выравниванию между физическим выполнением задач и цифровой копией операции в системах Digital Twins.
Основные области и сферы применения складской робототехники
Высокоэффективное управление товарными запасами при помощи роботизированных систем позволяет исключить возможные ошибки и аварии и максимально упростить большинство процессов. Интеграция программных и аппаратных решений для эффективного учета и управления основными складскими процессами ускоряет проведение складских операций, уменьшает объем рутинной работы и повышает работоспособность персонала.
С новыми достижениями в области навигационных технологий и функциональных возможностей, склады начинают использовать роботов для самых разных операций. Ниже рассмотрены основные отрасли, в которых применяются складские роботы сегодня.
- Дистрибуция и ретейл
Складские роботы помогают эффективно управлять складами с высокой эффективностью, грузооборотом и большим количеством артикулов и каталогов. Роботизированные устройства могут быть интегрированы с различными учетными системами. Информация о товарах, контрагентах, заказах, поставках - формируется, хранится и корректируется в системе управления предприятием. Все это обеспечивает эффективную работу в условиях широкого, постоянно растущего ассортимента, и оперативную обработку большого количества заказов. Автоматические склады помогают достичь многовариантного механизма приёмки входящих грузов. Робототехника дает возможность оптимизировать рабочие процессы и повысить пропускную способность склада. Современная система помогает в автоматическом порядке управлять погрузкой и разгрузкой вагонов, регистрировать маневровые работы, погрузочную документацию.
- Промышленность
Роботизация склада позволяет добиться автоматической приемки грузов с производственных линий. Система также дает возможность автоматически поставить на контроль качество. Роботизированные системы могут быть интегрированы с конвейерными линиями. Благодаря этому исключается пересорт и перегруз, происходит эффективное взаимодействие на участке «производство-склад». Существует высокий спрос на складских роботов в автомобильной промышленности, особенно в секторе запасных частей.
Также роботов активно используют на производстве в следующих отраслях промышленности:
- электротехника и электроника;
- химическая, резиновая и пластмассовая;
- фармацевтические препараты;
- одежда;
- текстиль;
- бумага и печать
- Государственный сектор
В госсекторе востребованы преимущественно краны-штабелеры, лифтовые стеллажи, роботизированные производственные складские системы, применяемые, в частности, в оборонном комплексе в целях минимизации рисков и ошибок.
Рис. 2. Сравнительные характеристики различных складских роботов
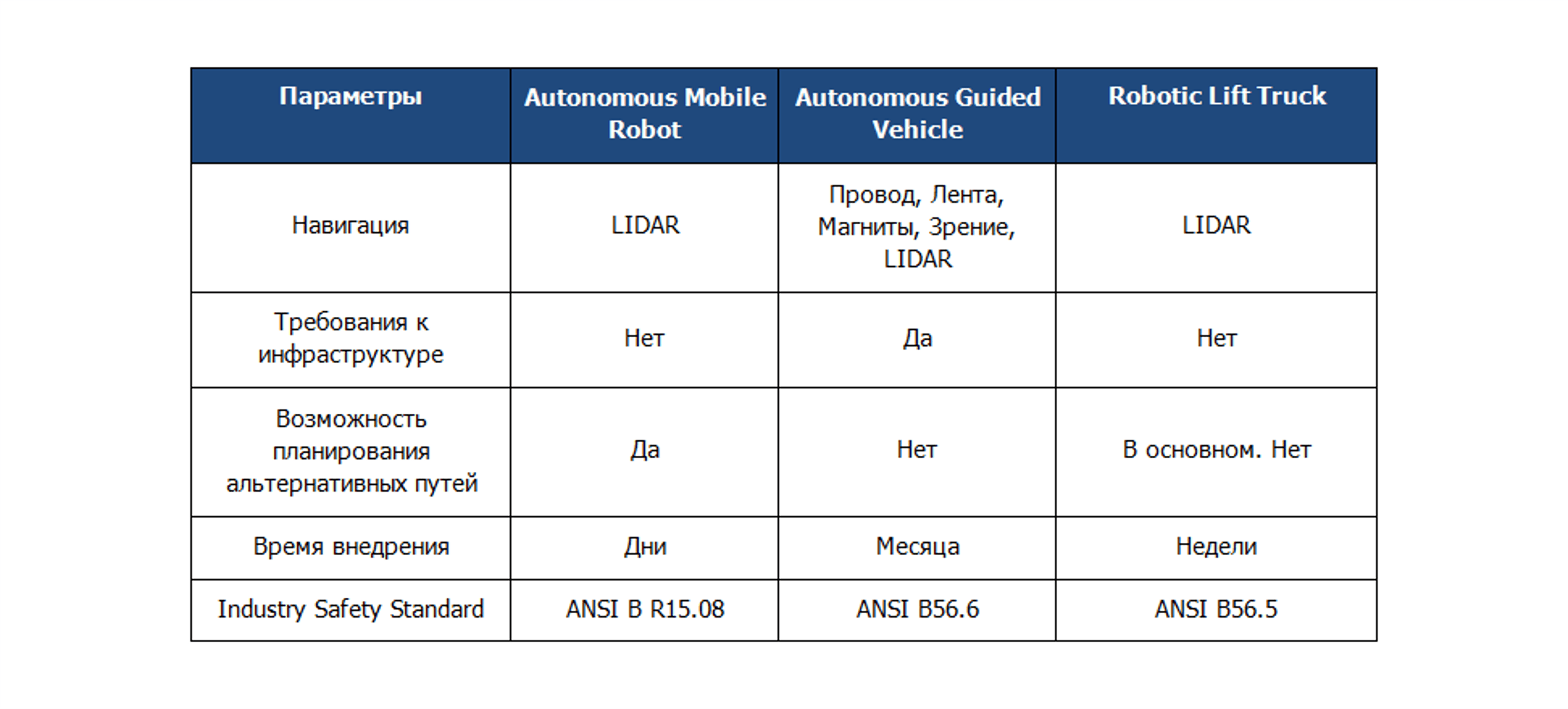 |
Источник: сайты производителей
Состояние российского рынка складской робототехники
Российский рынок автоматизированного оборудования для обработки материальных потоков продолжает развиваться на волне обоснованного интереса недавних лет к импортозамещению. Переход к автоматизированной обработке грузов происходит на всех этапах их следования – от производства до потребителя. Это отчасти объясняется и ростом интернет-торговли.
Можно выделить две существенные тенденции на рынке автоматизации в России. Первая касается изменений работы объектов складского хозяйства, а именно, значительное увеличение количества строк отбора. И если размер этого показателя незначителен, то говорить о высоком уровне автоматизации имеет смысл только при большом количестве крупных однородных заказов, в то время как 10 тыс. и более строк отбора ведет к необходимости роботизации вне зависимости от числа заказов. Эта особенность приводит производителей складских автоматизированных систем, преимущественно обслуживаемых высотным тяжелым роботом-штабелером, к разработке новых решений для высокоскоростной обработки небольших коробов и контейнеров.
Вторая тенденция просматривается среди консалтинговых компаний, проектировщиков и производителей оборудования, которые стремятся к системной интеграции для создания комплексных решений всех задач при создании складских объектов.
Немалый интерес заметен у заказчиков к технологиям палетных раннеров, шаттлов, которые используются совместно с набивными стеллажами. Данный спрос обусловлен необходимостью модернизации складских производственных мощностей ввиду высокой конкуренции в секторе логистических услуг.
Стоп-факторами, тормозящими внедрение складских роботов, российские компании называют необходимость больших инвестиций в проекты и долгие сроки окупаемости решений, вплоть до 30 лет. Дополнительным фактором отказа от инвестиций у владельцев компаний является низкая стоимость труда. Кроме того, законодательство постоянно и быстро меняется, предъявляются новые требования к хранению, маркировке продукции и товарной документации, хранимым данным. Стандартизация бизнес-процессов в таком климате крайне затруднительна, что затрудняет развитие складов.
Сегодня в России уже есть отечественные компании, предлагающие рынку решения в области роботизации складов. И не смотря на то, что полная автоматизация складов в России – вопрос далекого будущего, тренд на частичную автоматизацию процессов, без долгосрочных затрат, уже прослеживается. К примеру, происходит внедрение погрузчиков и роботизированных тележек, которые заменяют человека в одной цепочке процесса логистики.
Выводы. Рекомендации к внедрению
На данный момент уже существуют технологии, которые позволяют сделать «темные склады» - т.е. полностью автоматизированные. Например, «темный склад» фабрики BruTextil или склады Nike и Amazon. Несмотря на это, современная роботизированная логистика все еще далека от совершенства. От полной роботизации складских комплексов и всей цепочки снабжения мир отделяет порядка 10 лет - таково мнение директора департамента робототехники Amazon Скотта Андерсона. Тем не менее, автоматизация складов продолжается сегодня довольно высокими темпами, поэтому нет сомнений, что в ближайшие годы здесь также останется мало вакансий для людей. По прогнозам ABI Research, к 2025 г. на 50 тыс. складов по всему миру будет установлено более 4 млн роботов для выполнения различных операций. Автономные мобильные роботы (AMR) все чаще заменяют более тяжелую автоматизацию, которая требует значительных первоначальных инвестиций.
Многие поставщики, проанализированные в исследовании J’son & Partners Consulting (банк данных к отчету содержит информацию по более чем 200 моделям роботов различных типов, в т.ч. и российских производителей) предлагают очень гибкие системы, которые могут быть внедрены в текущую работу без необходимости изменения конфигурации объекта или изменения инфраструктуры. Автономные мобильные роботы позволяют проводить операции по «гибкой автоматизации», которая не ограничивается компоновкой объекта. Некоторые поставщики также предлагают пользователям возможность купить технологию «как услугу». Такая модель не только снижает риск, связанный с использованием технологии, но также может значительно повысить способность масштабироваться с динамическими меняющимися требованиями современного склада, не полагаясь на привлечение новых рабочих мест и вместо этого оптимизируя мощность и производительность существующих рабочих мест на предприятии. Однако этот тренд пока еще не дошел до Российской Федерации.
Потенциальным заказчикам следует осознавать, что даже самые продвинутые роботизированные решения не способны упорядочить хаос и одним из главных условий их внедрения является упорядочивание и формализация всех операционных и бизнес-процессов. При этом такие параметры как тип покрытия, технология хранения, наличие отопления и т.д. - начинают отходить на второй план, поставщики научились решать все эти вопросы. Более того, на рынке уже существуют решения, способные перемещаться по открытым площадкам даже с гравийным покрытием.
Детальные результаты исследования представлены в полной версии Отчета.
Аналитический Отчет "Роботы для транспортировки грузов на закрытых складах"
Содержание
1. АНАЛИЗ ВХОДНЫХ ДАННЫХ, НЕОБХОДИМЫХ ДЛЯ РЕАЛИЗАЦИИ ПРОЕКТА
2. ВВЕДЕНИЕ
2.1. ПОСТАНОВКА ЗАДАЧИ
2.2. МЕТОДИКА
2.3. ИСТОЧНИКИ
3. ОБЩЕЕ ОПИСАНИЕ РЫНКА РОБОТОТЕХНИКИ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ НА СКЛАДАХ.
3.1 РАЗВИТИЕ МИРОВОГО РЫНКА РОБОТОТЕХНИКИ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ НА СКЛАДАХ: ТЕНДЕНЦИИ И ПРОГНОЗ
3.2 ТЕХНОЛОГИИ И ДРАЙВЕРЫ РЫНКА РОБОТОТЕХНИКИ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ
3.3. СОВРЕМЕННОЕ СОСТОЯНИЕ РОССИЙСКОГО РЫНКА АВТОМАТИЗИРОВАННОГО ОБОРУДОВАНИЯ ДЛЯ СКЛАДСКОЙ ОБРАБОТКИ ГРУЗОВ. ОСНОВНЫЕ ТЕНДЕНЦИИ И ОСОБЕННОСТИ.
4. КЛАССИФИКАЦИЯ РОБОТОВ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ НА СКЛАДАХ.
4.1. ТИПЫ СКЛАДСКИХ РОБОТОВ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ НА СКЛАДАХ И ОПИСАНИЕ ПРИНЦИПА ИХ РАБОТЫ.
4.1.1. Автоматически/Автономно управляемое транспортное средство (Automated/Autonomous Guided Vehicle) – АУТС/AGV
4.1.2. Автономные мобильные роботы (Autonomous Mobile Robots)
4.1.3. Автоматизированные складские вилочные погрузчики RLT (Robotic Lift Truck)
4.2. ВИДЫ УПРАВЛЕНИЯ СКЛАДСКИМИ РОБОТАМИ.
1) Лазерная система позиционирования
2) Навигация по магнитной ленте
3) Навигация с использованием магнитных точек
4) Проводная навигация
5) Оптическая навигация по линии
6) Инерциальная навигация
7) Автономная навигация
4.3. ОПИСАНИЕ ТРЕБУЕМОЙ ИНФРАСТРУКТУРЫ В РАЗРЕЗЕ КАЖДОГО ТИПА СКЛАДСКОГО РОБОТА.
4.4. АНАЛИЗ НОРМАТИВНЫХ ОГРАНИЧЕНИЙ И БАРЬЕРОВ ВНЕДРЕНИЯ РАЗЛИЧНЫХ ТИПОВ СКЛАДСКИХ РОБОТОВ И ПОИСК ВАРИАНТОВ К ИХ ПРЕОДОЛЕНИЮ.
5. АНАЛИТИЧЕСКИЙ ОБЗОР ПРОИЗВОДИТЕЛЕЙ И РАЗРАБОТЧИКОВ СКЛАДСКИХ РОБОТОВ. ОЦЕНКА ГОТОВНОСТИ ТЕХНОЛОГИИ К ВНЕДРЕНИЮ. ИССЛЕДОВАНИЕ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ СКЛАДСКИХ РОБОТОВ. ВЫЯВЛЕНИЕ НЕДОСТАТКОВ И ПРЕИМУЩЕСТВ ИСПОЛЬЗОВАНИЯ СКЛАДСКИХ РОБОТОВ
5.1. РОССИЙСКАЯ ФЕДЕРАЦИЯ
5.2. США И КАНАДА
5.3. СТРАНЫ ЕВРОСОЮЗА
5.3.1. Германия
5.3.2. Великобритания
5.3.3. Франция
5.3.4. Другие страны Евросоюза
5.3.4.2. БЕЛЬГИЯ
5.4. АЗИАТСКИЕ СТРАНЫ
5.4.1. КНР
5.4.2. Япония
5.4.3. Другие азиатские страны
5.5. АВСТРАЛИЯ
5.6. ДРУГИЕ СТРАНЫ
6. ОЦЕНКА ПЕРСПЕКТИВЫ РАЗВИТИЯ РОБОТОВ ДЛЯ СКЛАДСКИХ ПОМЕЩЕНИЙ
6.1. ТИПОВАЯ СХЕМА ОБУСТРОЙСТВА ИНФРАСТРУКТУРЫ ДЛЯ РОБОТОВ ДЛЯ ТРАНСПОРТИРОВОЧНЫХ РАБОТ НА СКЛАДАХ
7. ВЫВОДЫ
7.1. ВЫВОДЫ О РАЗВИТОСТИ СКЛАДСКИХ РОБОТОВ В МИРЕ/РФ И ГОТОВНОСТИ К ВНЕДРЕНИЮ
7.2. ВЫВОДЫ О ПЕРСПЕКТИВАХ РАЗВИТИЯ СКЛАДСКИХ РОБОТОВ В МИРЕ/РФ
7.3. ВЫВОДЫ О ПРЕИМУЩЕСТВАХ И НЕДОСТАТКАХ ИСПОЛЬЗОВАНИЯ РОБОТОВ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ ПО ЗАКРЫТЫМ СКЛАДАМ
7.4. ВЫВОДЫ О НОРМАТИВНЫХ ОГРАНИЧЕНИЯХ И АДМИНИСТРАТИВНЫХ БАРЬЕРАХ ВНЕДРЕНИЯ СКЛАДСКИХ РОБОТОВ
7.5. ВЫВОДЫ О ВЛИЯНИИ ВНЕДРЕНИЯ СКЛАДСКИХ РОБОТОВ НА БЕЗОПАСНОСТЬ ПРОВЕДЕНИЯ ТРАНСПОРТИРОВКИ
7.6. РЕКОМЕНДАЦИИ К ИСПЫТАНИЯМ
ПРИЛОЖЕНИЕ 1. ПРИМЕР АНКЕТЫ ПРОИЗВОДИТЕЛЯ
ПРИЛОЖЕНИЕ 2. ОБОСНОВАНИЕ ВЫБОРА ОБЪЕКТА БИЗНЕС ЭКСПЕРТИЗЫ ПО ПРОЕКТУ: «ОЦЕНКА ВОЗМОЖНОСТИ ИСПОЛЬЗОВАНИЯ РОБОТОВ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ ПО ЗАКРЫТЫМ СКЛАДСКИМ ПЛОЩАДЯМ».
Список рисунков
Рис. 1. Инвестиции в компании производящих роботов для складов
Рис. 2. Вендоры лидеры из отчета IDS
Рис. 3. Самоходная транспортная тележка
Рис. 4. Автономный Тягач (Буксир)
Рис. 5. Робот для перевозки (пакетированных грузов)
Рис. 6. Схема применения роботов для перевозки (пакетированных грузов)
Рис. 7. Автономные мобильные роботы
Рис. 8. Робот для перевозки паллет с подъемником
Рис. 9. Лазерная система позиционирования
Рис. 10. Навигация по магнитной ленте
Рис. 11. Навигация по магнитным точкам
Рис. 12. Навигация по кабелю
Рис. 13. Навигация по нарисованной линии (концепция)
Рис. 14. Перевозка тяжелого груза по нарисованной линии
Рис. 15. Навигация по магнитной ленте
Рис. 16. Робот компании 1
Рис. 17. Робот компании 2
Рис. 18. Робот компании 3
Рис. 19. Робот компании 4
Рис. 20. Робот компании 5
Рис. 21. Роботы компании 6
Рис. 22. Робот компании 7
Рис. 23. Робот компании 8
Рис. 24. Робот компании 9
Рис. 25. Робот компании 10
Рис. 26. Робот компании 11
Рис. 27. Робот компании 12
Рис. 28. Робот компании 13
Рис. 29. Робот компании 14. Сверхмощный транспортер
Рис. 30. Робот компании 15
Рис. 31. Робот компании 16
Рис. 32. Робот компании 17
Рис. 33. Робот компании 18
Рис. 34. Робот компании 19
Рис. 35. Робот компании 20
Рис. 36. Робот компании 21
Рис. 37. Робот компании 22
Рис. 38. Робот компании 23
Рис. 39. Робот компании 24
Рис. 40. Робот компании 25
Рис. 41. Робот компании 26
Рис. 42. Робот компании 27
Рис. 43. Робот компании 28
Рис. 44. Робот компании 29
Рис. 45. Автоматические тележки компании 30
Рис. 46. Робот компании 31
Рис. 47. Робот-тележка компании 32
Рис. 48. Робот компании 33
Рис. 49. Робот компании 34
Рис. 50. Робот компании 35
Рис. 51. Робот компании 36
Рис. 52. Робот компании 37
Рис. 53. Робот компании 38
Рис. 54. Робот компании 40
Рис. 55. Робот компании 41
Рис. 56. Робот компании 42
Рис. 57. Промышленный робот компании 43
Рис. 58. Робот компании 44
Рис. 59. Робот компании 45
Рис. 60. Робот компании 46
Рис. 61. Робот компании 47
Рис. 62. Роботы компании 48
Рис. 63. Робот компании 49
Рис. 64. Робот компании 50
Рис. 65. Робот компании 51
Рис. 66. Робот компании 52
Рис. 67. Робот компании 53
Рис. 68. Робот компании 54
Рис. 69. Робот компании 55
Рис. 70. Робот компании 56
Рис. 71. Робот компании 57
Рис. 72. Линейка AGV от компании 58
Рис. 73. Робот компании 59
Рис. 74. Робот компании 60
Рис. 75. Роботы компании 61
Рис. 76. Робот компании 62 на магнитной ленте
Рис. 77. Робот компании 63
Рис. 78. Робот компании 64
Рис. 79. Роботы компании 65
Рис. 80. Робот компании 66
Рис. 81. Производственная линия компании 67
Рис. 82. Робот компании 68
Рис. 83. Робот компании 69
Рис. 84. Робот компании 70
Рис. 85. Робот компании 71
Рис. 86. Робот компании 72
Рис. 87. Робот компании 73
Рис. 88. Схема полностью автоматизированного предприятия
Список таблиц
Табл.1. Источники
Табл.2. Запросы поставщикам
Табл.3.Сравнительные характеристики различных роботов
